
- Intelligent Mobility
- Electronics and Electric Drives
- Robotics and Automation
- Intelligent Sensors and Signals
- Economic and Social Transformation
- Artificial Intelligence and Data Science
Die Automatisierung intralogistischer Prozesse ist ein wichtiger Schlüssel zur nachhaltigen Sicherung der Wettbewerbsfähigkeit von Unternehmen in einem durch Globalisierung und verstärktem Wettbewerb geprägten Markt. Aufgrund der großen Bedeutung dieses Themas kooperiert die TH Aschaffenburg bereits seit vielen Jahren auf dem Gebiet der angewandten Forschung und Entwicklung mit starken Partnern aus der Logistikindustrie. Hierzu zählt z.B. die Linde Material Handling GmbH, einer der weltweit führenden Hersteller von Flurförderzeugen (FFZ) und Industriepartner im Rahmen des vom Freistaat Bayern geförderten Projektes „Kooperative Autonome Intralogistik Systeme“ (KAnIS).
Ziel des Projektes war die Entwicklung neuer Methoden zur intelligenten Vernetzung und Automatisierung innerbetrieblicher Flurförderzeuge. Eine derart vernetzte Flotte soll durch kooperatives Verhalten beim autonomen Fahren, der Auftragsplanung und Auftragsbearbeitung sowie durch Auswertung eines möglichst umfassenden Datenbestands eine deutliche Erhöhung des innerbetrieblichen Waren- und Materialflusses erreichen und damit maßgeblich zur Optimierung der Wirtschaftlichkeit und Effizienz intralogistischer Prozesse beitragen. Hierbei kommen die neuesten Methoden der Künstlichen Intelligenz und des Maschinellen Lernens zum Einsatz. Thematisch gliederte sich das Vorhaben in die Teilarbeitspakete "KoopLogistik" und "KoopAutonomie".
-
KoopLogistik
Das Teilarbeitspaket KoopLogistik widmete sich der zentralen Fragestellung, welche neuen Möglichkeiten sich durch die gezielte Vernetzung und Kooperation der einzelnen Flottenmitglieder für die Optimierung intralogistischer Prozesse eröffnen. Erforscht wurden neuartige Strategien der Auftragsplanung und der Auftragsbearbeitung, der vorausschauenden Wartung sowie des Energie- und Batteriemanagements von Flurförderzeugen. Gemeinsames Merkmal dieser Strategien ist die gezielte Auswertung eines möglichst umfangreichen, kooperativ bereitgestellten und in der Cloud fusionierten Datensatzes. Zum Einsatz kamen hierbei die Methoden der Künstlichen Intelligenz, neuste netzwerktheoretische Ansätze (z.B. aus der Graphentheorie) und ereignisdiskrete Simulationsmethoden.
Wichtige Zielstellungen der Optimierung der intralogistischen Prozesse waren:
- die Erhöhung des innerbetrieblichen Waren- und Materialflusses sowie die Verkürzung der Waren- und Materialdurchlaufzeiten
- die Erfassung des Wartungs- und Verschleißzustandes der einzelnen Flottenmitglieder
- hierauf aufbauend die Realisierung einer intelligenten Auftragsplanung und einer vorausschauenden Wartung der FFZ-Mitglieder (Predictive Maintenance) zur Verhinderung unnötiger Ausfallzeiten
- die Reduzierung der Energiekosten durch die Einbindung innovativer Energiemanagement-systeme in autonome und lernende Logistiksysteme
- die Maximierung der Einsatzzeiten der Flottenmitglieder durch die Realisierung eines intelligenten Batterie-/ Lademanagement-Systems sowie eines innovativen induktiven Batterieladeverfahrens für elektrisch angetriebene FFZ
-
KoopAutonomie
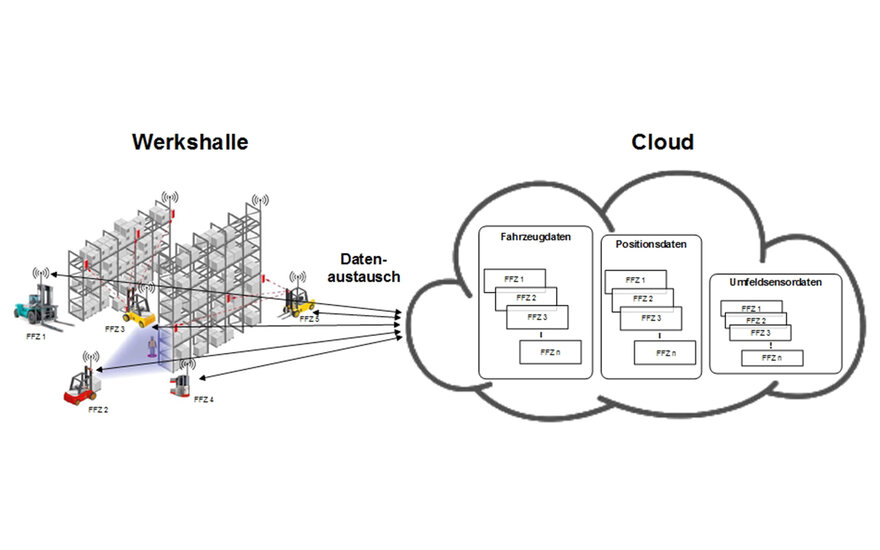
In diesem Teilarbeitspaket wurde ein neuartiger kooperativer Ansatz zur Automatisierung innerbetrieblicher Flurförderzeug-Flotten erforscht. Hierbei stellten die einzelnen Flurförderzeuge (kurz: FFZ) die Daten ihrer Umfeldsensoren, ihre Positionsinformationen sowie weitere wichtige Fahrzeugdaten über eine Kommunikationsplattform einer zentralen Einheit, der Cloud, zur Verfügung (siehe die Skizze unten). Umgekehrt wurden jedem Mitglied der Flotte zur Ergänzung der Daten der bordeigenen Sensorik zusätzlich wichtige Sensorinformationen und Fahrzeugdaten der anderen FFZ sowie die Informationen weiterer auf dem Betriebsgelände stationär montierter Sensoren per Funkübertragung von der zentralen Einheit übermittelt. Durch eine geeignete Sensordatenfusion standen damit allen FFZ, unabhängig von ihrer individuellen Sensorausstattung, nahezu die gleiche Information über das Fahrzeugumfeld (kooperative Perzeption) und die eigene Position (kooperative Lokalisierung) zur Verfügung.
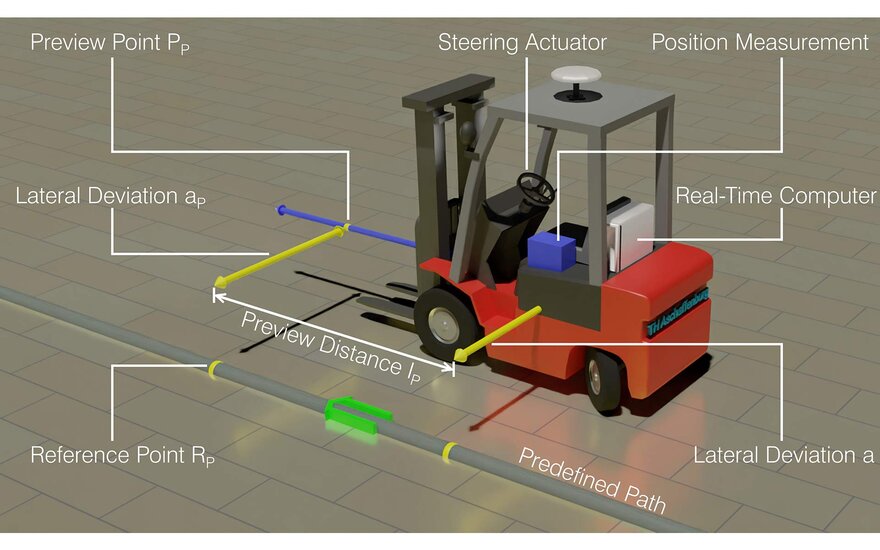
Ein weiterer Schwerpunkt des Forschungsvorhabens KoopAutonomie war die Methodenentwicklung zur automatischen Spurführung von FFZ. Erforscht wurden innovative Steuerungs- und Regelungsalgorithmen, welche auf Basis der von der kooperativen Perzeption und Lokalisierung bereitgestellten Daten eine gezielte Ansteuerung von Lenkung, Antrieb und Bremse ermöglichen und somit eine hochgenaue Sollbahnfolge (siehe die folgende Skizze) sowie Einhaltung des vorgegebenen Sollgeschwindigkeitsverlaufs gewährleisten.
Ein besonderes Augenmerk lag hierbei auf dem durch die unterschiedlichen FFZ-Varianten und veränderlichen Fahrzeugparameter (z.B. veränderliche Fahrzeugmasse und Schwerpunktlage durch Lastaufnahme) hervorgerufenen stark variierenden Lenkungsverhalten der einzelnen Flottenmitglieder. Letzteres muss bei der Reglerauslegung unbedingt berücksichtigt werden, um ein stabiles Regelkreisverhalten und damit eine sichere Fahrzeugführung zu gewährleisten. Ziel der Forschung war ein für alle FFZ-Varianten universell einsetzbares Steuerungs- und Regelungskonzept, welches sich durch den Einsatz modernster Methoden des Maschinellen Lernens selbständig an die veränderlichen FFZ-Varianten und Fahrzeugparameter adaptiert.

-


Stefan Prokosch
SVP Productmanagement Industrial Trucks Counterbalance Linde Material Handling GmbH, Deutschland
„Durch die Kooperation mit der TH Aschaffenburg stemmen wir Themen, die wir aufgrund des hohen Zeitaufwandes so alleine nicht geschafft hätten.“
-
Projektteilnehmende der TH AB
- Prof. Dr.-Ing. Bochtler, Mess- und Schaltungstechnik
- Prof. Dr.-Ing. Doll, Kooperative automatisierte Verkehrssysteme
- Prof. Dr. Eley, Logistik und Optimierung
- Prof. Dr. Hartmann, Energiemanagement
- Prof. Dr.-Ing. Krini, Signal- und Sensorverarbeitung
- Prof. Dr.-Ing. Mann, Energiemanagement
- Prof. Dr. Möckel, Mathematik, Machine Learning, Vorausschauende Instandhaltung
- Prof.Dr.-Ing. Mußenbrock, Energiemanagement und -effizienz
- Prof. Dr. Stark, Mathematik, Signalverarbeitung, Projektkoordinierung
- Prof. Dr.-Ing. Teigelkötter, Elektrische Antriebstechnik, Batteriemanagement
- Prof. Dr.-Ing. Thielemann, Mikrosystemtechnik und Sensoren, Biologische Neuronale Netze
- Prof. Dr.-Ing. Zindler, Automatisierungs- und Steuerungstechnik, Fahrzeugsteuerung
Sie forschen an einem ähnlichen Thema und möchten sich mit uns zu diesem Projekt austauschen? Wir freuen uns auf Ihre Kontaktaufnahme.
-
Vizepräsident Forschung und Transfer

Prof. Dr.-Ing. Klaus Zindler
Vizepräsident-
Würzburger Straße 45
Raum C1/22/104
63743 Aschaffenburg - klaus.zindler@th-ab.de
- (0 60 21) 4206 - 910
-
Würzburger Straße 45
-
Projektleitung

Prof. Dr. Hans-Georg Stark
Professor Fakultät Ingenieurwissenschaften-
Würzburger Straße 45
Raum C1/24/108
63743 Aschaffenburg - hans-georg.stark@th-ab.de
- (0 60 21) 4206 - 878
-
Würzburger Straße 45
