-
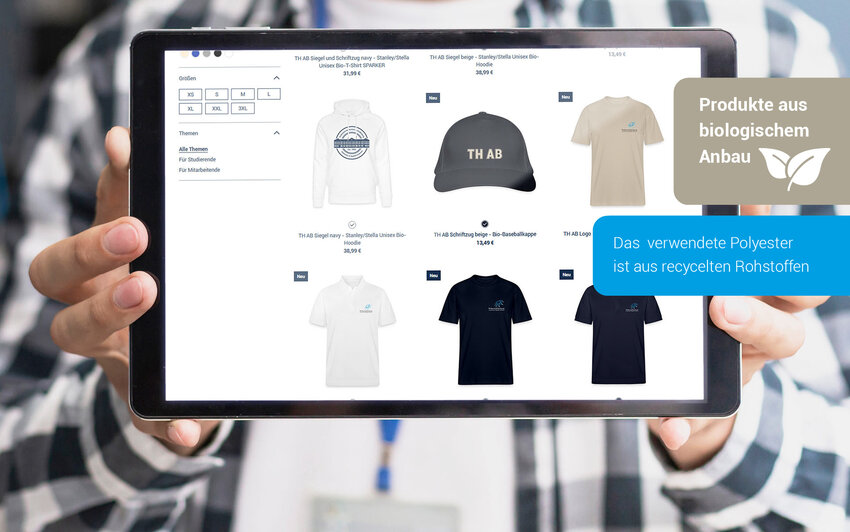
Hochschulshop der TH AB
01
Im Shop finden Sie Merchandise-Artikel wie Hoodies, T-Shirts, Polo-Shirts und Kappen. Folgen Sie dem Instagram-Kanal @studiereninab und verpassen Sie keine neuen Artikel und Rabattaktionen.
-
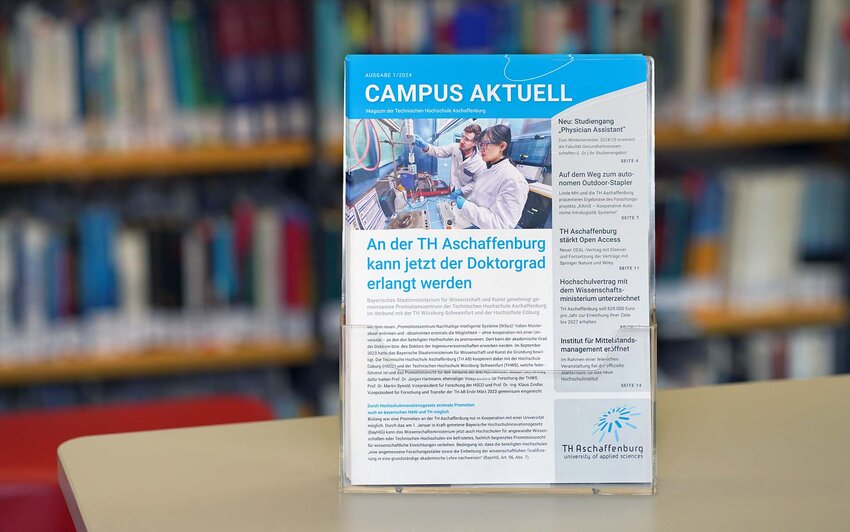
Neue Ausgabe des Magazins "Campus aktuell"
02
Das Hochschulmagazin gibt auch in der Ausgabe 1/2024 wieder Einblicke in das Hochschulleben des vergangenen Semesters. Lesen Sie Interessantes aus Studium, Lehre, Forschung und Transfer.
-
Studienwahl: Online-Infoabende der TH AB
03
Du erhältst online ausführliche Informationen über das Studium, lernst die Studiengänge sowie deren Inhalte kennen und kannst all deine Fragen stellen.

Was suchst du? Suche nach Studiengängen, einer Person oder einem Thema
Am meisten gesucht
Schnell geklickt
Nichts gefunden? Dann melde dich bei uns!
Die TH Aschaffenburg zählt zu den besten Hochschulen für angewandte Wissenschaften. Sie punktet regelmäßig in Rankings mit optimalen Bedingungen für ein erfolgreiches Studium.
Mehr über uns erfahren
















-
Was Studierende sagen ...
„Du willst wissen welchen Einfluss Licht, Geruch und Geräusche auf unser Kaufverhalten haben? Es interessiert dich, wie man Werbung so einsetzt, dass man die gewünschte Zielgruppe damit anspricht? Und du fragst dich, wie Mitarbeiter optimal motiviert werden können, um so den Erfolg des Unternehmens langfristig zu sichern? Dann bist du – so wie ich – im Studiengang Wirtschaftspsychologie genau richtig. Durch die Verknüpfung von Psychologie und Wirtschaft lerne ich hier, wie man ein Unternehmen zum Erfolg führen kann. Das Studium macht richtig Spaß und bringt mich weiter!“
-
Was Studierende sagen ...
„Ich studiere Erneuerbare Energien und Energiemanagement, da es ein Studiengang mit vielen Bereichen und späteren Möglichkeiten ist. Der Studiengang befasst sich, wie der Name vermuten lässt, mit Erneuerbaren Energien und der dazugehörigen Elektrotechnik. Auch Grundlagen und tiefere Einblicke in alltagsrelevante Themen werden gelehrt. Für die TH AB habe ich mich entschieden, da ich einige Bekannte habe, die ihr Studium hier abgeschlossen und viel Positives berichtet haben. Auch gefällt mir der Campus und der Praxisbezug, den die TH bietet.“
-
Was Studierende sagen ...
„Für mich ist dieser Studiengang genau der Richtige, weil meine Interessen mit dem Studiengang Software Design genau zusammenhängen, also wie entwickelt man Apps, wie entwickelt man eine Software, was passiert im Hintergrund des Computers und der Apps.“





